
1. ņä£ ļĪĀ
ļ¼╝ņ▓┤ ņÜ┤ļÅÖņØś ļ»ĖņäĖĒĢ£ Ļ░ĆņåŹļÅä ļ░Å Ļ░üņåŹļÅäļź╝ ņĖĪņĀĢĒĢśļŖö Ļ┤Ćņä▒ņä╝ņä£ (inertial measurement unit, IMU)ņÖĆ ĻĘĖļ”¼Ļ│Ā ļ¼╝ņ▓┤ņØś ļ│Ćņ£äņŚÉ ļīĆĒĢ£ ļ╣äĻĄÉņĀü ņĢłņĀĢņĀüņØĖ ņŗ£ĻĘĖļäÉņØä ņĀ£Ļ│ĄĒĢśļŖö ņ£äņä▒ĒĢŁļ▓Ģņŗ£ņŖżĒģ£ (global navigation satellite system, GNSS)ņØä Ļ▓░ĒĢ®ĒĢśņŚ¼ ĻĄÉļ¤ē ļō▒ ņ£Īņāü ĻĄ¼ņĪ░ļ¼╝ņØś ņÜ┤ļÅÖļ│Ćņ£äļź╝ ņĖĪņĀĢĒĢśļŖö ņØ╝ņóģņØś ņä╝ņä£ņ£ĄĒĢ®ĻĖ░ļ▓ĢņØ┤ ņé¼ņÜ®ļÉśĻ│Ā ņ׳ļŗż (Rossi et al., 2021; Shen et al., 2019). ļ│Ė ņ£ĪņāüņĀüņÜ®ņŚÉņä£ļŖö ņØĖĻĘ╝ņØś GNSS ņāüņŗ£Ļ┤ĆņĖĪņåīļōżĻ│╝ ņŚ░Ļ│äļÉ£ RTK (Real Time Kinematic) ļśÉļŖö DGPS (Differential Global Positioning System) ĻĖ░ļ▓ĢņØä ņØ┤ņÜ®ĒĢśņŚ¼ ļ╣äĻĄÉņĀü ņĢłņĀĢņĀüņØ┤Ļ│Ā ņĀĢĒÖĢĒĢ£ GNSS Ļ┤ĆņĖĪņØä ņłśĒ¢ēĒĢĀ ņłś ņ׳ļŗż. ĻĘĖļ¤¼ļéś ņĀüņÜ®ļīĆņāüņØ┤ ņ£Īņ¦ĆņŚÉņä£ ļ®Ćļ”¼ ļ¢©ņ¢┤ņ¦ä ĒĢ┤ņ¢æĻĄ¼ņĪ░ļ¼╝ Ļ░ÖņØĆ Ļ▓ĮņÜ░ņŚÉļŖö ņØĖĻĘ╝ņŚÉ ņ░ĖņĪ░ņŗ£ĻĘĖļäÉņØä ņĀ£Ļ│ĄĒĢĀ ņłś ņ׳ļŖö ņāüņŗ£Ļ┤ĆņĖĪņåīĻ░Ć Ļ░ĆņÜ®ĒĢśņ¦Ć ņĢŖņØĆ Ļ▓ĮņÜ░Ļ░Ć ņØ╝ļ░śņĀüņØ┤ļŗż. ņØ┤ Ļ▓ĮņÜ░ņŚÉļŖö GPS 1ĻĖ░ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņ£äņä▒ļōżņØś ņĀĢĒÖĢĒĢ£ ņ£äņ╣śņÖĆ ņ£äņä▒ļōż ņŗ£ĻĘĖļäÉņØś ņāüĒśĖļ╣äĻĄÉļź╝ ĒåĄĒĢśņŚ¼ GPS ņĢłĒģīļéś ņ£äņ╣śļź╝ Ēżņ░®ĒĢśļŖö ņĀĢļ░Ćļŗ©ļÅģņĖĪņ£ä (PPP, Precise Point Positioning)Ļ░Ć ļ░£ņĀäļÉśņ¢┤ ņÖöļŗż. ļ│Ė ļ░®ļ▓ĢņØĆ ļ░śņåĪĒīī ĻĖ░ļ░ś (carrier-based)ņ£╝ļĪ£ņä£, ņĮöļō£ĻĖ░ļ░ś (code-based)ņØś ņØśņé¼Ļ▒░ļ”¼ (pseudo-range)ļź╝ ņĖĪņĀĢĒĢśļŖö Ļ│╝Ļ▒░ņØś DGNSS ļ░®ļ▓Ģļ│┤ļŗż ņĀĢĒÖĢĒĢ£ ņ£äņ╣śņĖĪņĀĢņØ┤ Ļ░ĆļŖźĒĢ£ Ļ▓āņ£╝ļĪ£ ņĢīļĀżņĀĖ ņ׳ļŗż. Yigit (2016)ņÖĆ Yigit and Gurlek (2017)ļŖö ļ│Ė PPP ĻĖ░ļ▓ĢņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņŗżĒŚśĻĄ¼ņĪ░ļ¼╝ņØś ņ¦äļÅÖņØä ņĖĪņĀĢĒĢĀ ņłś ņ׳ļŖö Ļ░ĆļŖźņä▒ņØä ļ│┤ņØĖ ļ░ö ņ׳ļŗż.
Choi et al. (2020)ņØĆ ņāüĻĖ░ PPP ņĖĪņĀĢĻ│╝ Ļ┤Ćņä▒ņä╝ņä£ņØś ņĖĪņĀĢņØä Ļ▓░ĒĢ®ĒĢśļŖö ņä╝ņä£ņ£ĄĒĢ®ĻĖ░ļ▓ĢņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņłśĒÅē ņ║öĒŗĖļĀłļ▓ä ņŗØ ņŗżĒŚś ĻĄ¼ņĪ░ļ¼╝ņŚÉ ļīĆĒĢ£ ņ¦äļÅÖņŗżĒŚśņØä ņłśĒ¢ēĒĢśņśĆņ£╝ļ®░ GNSS 1ĻĖ░ļ¦īņØä ņé¼ņÜ®ĒĢśļŖö ļŗ©ļÅģņĖĪņ£ä, ĻĄŁĒåĀņ¦Ćļ”¼ņĀĢļ│┤ņøÉņŚÉņä£ ņĀ£Ļ│ĄĒĢśļŖö network RTK ļ░®ņŗØņØĖ VRS (Virtual Reference Station) ņĖĪņ£ä, ņĀĢļ░Ćļŗ©ļÅģņĖĪņ£ä ĻĘĖļ”¼Ļ│Ā ņä╝ņä£ņ£ĄĒĢ®ņĖĪņ£äņØś Ļ▓░Ļ│╝ļōżņØä ļ╣äĻĄÉĒĢśņśĆļŗż. ĻĘĖ Ļ▓░Ļ│╝ ļ│Ė ņä╝ņä£ņ£ĄĒĢ® ĻĖ░ļ▓ĢņØ┤ ņ¦äļÅÖ Ļ│Āņ£ĀņŻ╝ĻĖ░Ļ░Ć ņāüļīĆņĀüņ£╝ļĪ£ Ēü¼ļ®░ ņ¦äĒÅŁņØ┤ Ēü░ ņ¦äļÅÖņØä Ēżņ░®ĒĢĀ ņłś ņ׳ļŖö Ļ▓āņ£╝ļĪ£ ļéśĒāĆļé¼ļŗż. ĻĘĖļ¤¼ļéś ņāüĻĖ░ ņŚ░ĻĄ¼ļŖö ņĖĪņ¦ĆņÜ® (geodetic) GNSSņÖĆ Ļ┤Ćņä▒ņä╝ņä£ļź╝ ņĪ░ĒĢ®ĒĢśņŚ¼ ņä╝ņä£ņ£ĄĒĢ®ļ¬©ļōłņØä ĻĄ¼ņä▒ĒĢśņśĆĻĖ░ ļĢīļ¼ĖņŚÉ ļæÉ ĻĖ░ĻĖ░ņØś Ļ│äņĖĪ ļÅÖņŗ£ņä▒ņØä ĒÖĢļ│┤ĒĢśĻĖ░Ļ░Ć ļČłĻ░ĆĒĢśņśĆņ£╝ļ®░ Ļ░ü ļŹ░ņØ┤Ēä░ņØś time stampļź╝ ņ£ĪņĢłņ£╝ļĪ£ ņĪ░ņĀĢĒĢ┤ņĢ╝ ĒĢśļŖö ņ¢┤ļĀżņøĆņØ┤ ņ׳ņŚłļŗż, ņØ┤ņÖĆ Ļ░ÖņØĆ ņ£ĪņĢł ņĪ░ņĀĢņØĆ ņ¦äļÅÖ ņŻ╝ĻĖ░Ļ░Ć ļ╣äĻĄÉņĀü ĻĖ┤ Ļ▓ĮņÜ░ņŚÉļŖö ņ¢┤ļŖÉ ņĀĢļÅä Ļ░ĆļŖźĒĢśļéś ņŻ╝ĻĖ░Ļ░Ć ņ¦¦ņØĆ Ļ▓ĮņÜ░ņŚÉļŖö ņé¼ņÜ®ņ×ÉņØś ņ×äņØśņä▒ņØ┤ ņ×æņÜ®ļÉĀ Ļ░ĆļŖźņä▒ņØ┤ ļ¦żņÜ░ ļåÆļŗż.
ĻĖłļ▓ł ņŚ░ĻĄ¼ņŚÉņä£ļŖö ĻĄ¼ņĪ░ļ¼╝ Ļ▒┤ņĀäņä▒ ĒÅēĻ░ĆņŚÉ ņé¼ņÜ®ĒĢśĻĖ░ ņ£äĒĢ£ ņä╝ņä£ņ£ĄĒĢ®ļ¬©ļōłņØś ĻĄŁņé░ĒÖöļź╝ ļ¬®ņĀüņ£╝ļĪ£ ņĀĆĻ░ĆĒśĢ GNSSņÖĆ IMUņØś ņøÉņŗ£ ņä╝ņä£ļōżņØä ņĪ░ĒĢ®ĒĢśĻ│Ā ņØ┤ļōżņØś time stampļź╝ Ļ│Ąņ£ĀĒĢĀ ņłś ņ׳ļŖö ņä╝ņä£ņ£ĄĒĢ®ļ¬©ļōłņØä ĻĄ¼ņä▒ĒĢśņśĆļŗż. ņĢäņÜĖļ¤¼ Choi et al. (2020)ņØśņäĀĒ¢ēņŚ░ĻĄ¼ņŚÉņä£ ņé¼ņÜ®ļÉ£ ņłśĒÅē ņ╝äĒŗĖļĀłļ▓ä ņŗØ ļ¬©ĒśĢĻĄ¼ņĪ░ļ¼╝ņŚÉ ļīĆĒĢ£ ņ¦äļÅÖņŗżĒŚśņØä ļŗżņŗ£ ņłśĒ¢ēĒĢśņśĆļŗż. ļ│Ė ļģ╝ļ¼ĖņØś ņĀ£2ņĀłņŚÉņä£ļŖö ņŗ£ļÅäļÉ£ ņä╝ņä£ņ£ĄĒĢ® ļ¬©ļōłņØś ĻĄ¼ņä▒Ļ│╝ ļŹ░ņØ┤Ēä░ļÅģņĘ© ĒöäļĪ£ĻĘĖļשņØä, ņĀ£3ņĀłņŚÉņä£ļŖö ņĪ░ĒĢ®ļÉ£ ņä╝ņä£ņ£ĄĒĢ®ļ¬©ļōłņØś ņä▒ļŖźņŗ£ĒŚśņØä, ņĀ£4ņĀłņŚÉņä£ļŖö ņĖĪņĀĢ ļŹ░ņØ┤Ēä░ņØś ļČäņäØņØä ĻĖ░ņłĀĒĢśņśĆļŗż. ĻĘĖļ”¼Ļ│Ā ņĀ£5ņĀłņŚÉņä£ļŖö ņĀĢļ░Ćļŗ©ļÅģņĖĪņ£äņØś ĒŖ╣ņä▒ņØä ĒåĀļĪĀĒĢśņśĆņ£╝ļ®░, ļ¦łņ¦Ćļ¦ē ņĀ£5ņĀłņŚÉņä£ļŖö ļ│Ė ņŚ░ĻĄ¼ņØś Ļ▓░ļĪĀ ļ░Å ņĀ£ņĢłņé¼ĒĢŁņØä ĻĖ░ņłĀĒĢśņśĆļŗż.
2. ņä╝ņä£ņ£ĄĒĢ®ļ¬©ļōłņØś ĻĄ¼ņä▒
2.1 ņä╝ņä£ ņĪ░ĒĢ®
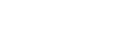
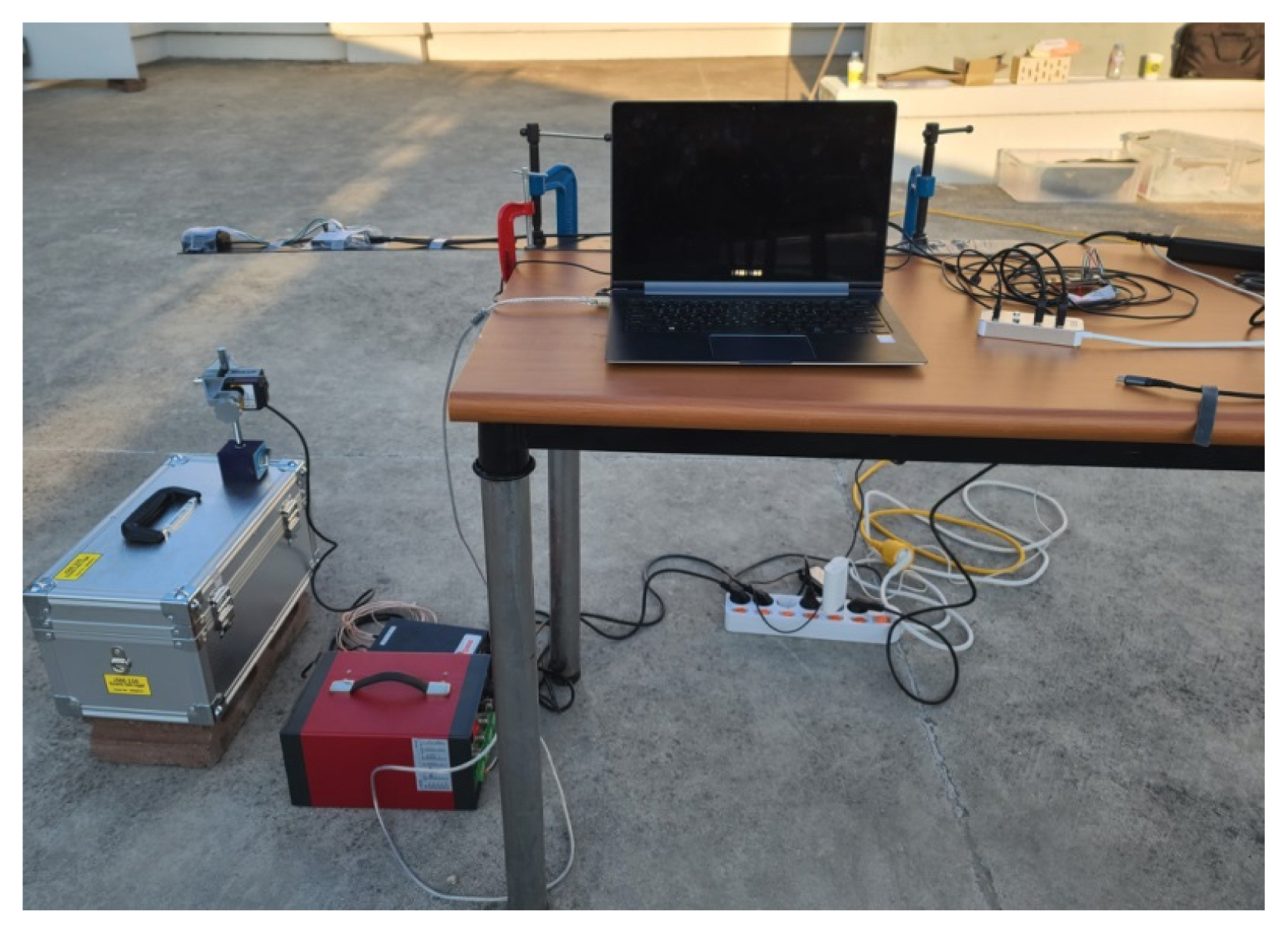
ņä╝ņä£ņ£ĄĒĢ® ļ¬©ļōłņØä ĻĄ¼ņä▒ĒĢśĻĖ░ ņ£äĒĢ£ GNSS ņä╝ņä£ņÖĆ Ļ┤Ćņä▒ņä╝ņä£ (IMU)ļŖö Fig. 1ņŚÉņä£ ļ│┤ņØ┤ļŖö ļ░öņÖĆ Ļ░Öņ£╝ļ®░ Ļ░ü ņä╝ņä£ņØś ĒŖ╣ņ¦ĢņØä Table 1Ļ│╝ Table 2ņŚÉ ņĀĢļ”¼ĒĢśņśĆļŗż.
GNSS ņä╝ņä£ļŖö ņŖżņ£äņŖżņØś U-bloxņŚÉņä£ ņĀ£ņ×æĒĢśņśĆņ£╝ļ®░ Sparkfunņé¼ņŚÉņä£ ņĪ░ļ”Į ņČ£ņŗ£ĒĢ£ ZED-F9Pļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņä╝ņä£ņĪ░ĒĢ®ņØä ņŗ£ļÅäĒĢśņśĆļŗż. ļ│Ė ņä╝ņä£ļŖö ņŻ╝Ēīīņłś L1Ļ│╝ L2ļź╝ ņé¼ņÜ®ĒĢśĻĖ░ ļĢīļ¼ĖņŚÉ GNSS ņŗ£ĻĘĖļäÉņØś ļīĆĻĖ░ņĖĄ ĒåĄĻ│╝ ņżæ ļ░£ņāØĒĢśļŖö ņśżņ░©ļź╝ ĒÜ©Ļ│╝ņĀüņ£╝ļĪ£ ņĀ£Ļ▒░ĒĢĀ ņłś ņ׳ņ£╝ļ®░ ņĄ£ļīĆ 20 HzņØś ļŹ░ņØ┤Ēä░ ņāśĒöīļ¦üņØ┤ Ļ░ĆļŖźĒĢśļŗż. ĻĘĖļ”¼Ļ│Ā GPS, GLONASS, GALILEO, BAIDU ļō▒ņØś ņŚ¼ļ¤¼ ņ£äņä▒Ļ│╝ ĻĄÉņŗĀņØ┤ Ļ░ĆļŖźĒĢśļ®░ RTKļź╝ ņÜ┤ņÜ®ĒĢĀ Ļ▓ĮņÜ░ ņłś cm ņØ┤ļé┤ņØś ņĖĪņ£äĻ░Ć Ļ░ĆļŖźĒĢ£ Ļ▓āņ£╝ļĪ£ ņĢīļĀżņĀĖ ņ׳ļŗż. ņĢłĒģīļéśļŖö ņŻ╝Ēīīņłś L1Ļ│╝ L2 ļō▒ ļŗżņżæņŻ╝Ēīīņłśļź╝ ņłśņÜ®ĒĢĀ ņłś ņ׳ļŖö ANN-MB-00ņØä ņé¼ņÜ®ĒĢśņśĆļŗż. ļ│Ė ņĢłĒģīļéśļŖö ņ¦üĻ▓ĮņØ┤ ļīĆļץ 8 cm, ņ¦łļ¤ēņØ┤ 175 gņØĖ ņåīĒśĢņ£╝ļĪ£ņä£ ņ×ÉņäØņŗØ ĒāłļČĆņ░®ņØ┤ Ļ░ĆļŖźĒĢśĻĖ░ ļĢīļ¼ĖņŚÉ ĻĄ¼ņĪ░ļ¼╝ ņ×äņØśņĀÉņŚÉ ĒÜ©Ļ│╝ņĀüņ£╝ļĪ£ ņäżņ╣śĒĢĀ ņłś ņ׳ļŗż. ļ│Ė GNSS ņä╝ņä£ļŖö U-Bloxņé¼ņØś ņĀäņÜ® ņåīĒöäĒŖĖņø©ņ¢┤ņØĖ U-centerļź╝ ņé¼ņÜ®ĒĢśņŚ¼ ņĀ£ņ¢┤ĒĢĀ ņłś ņ׳ļŗż.
Ļ░ĆņåŹļÅäĻ│äļŖö ņŚŁņŗ£ Sparkfunņé¼Ļ░Ć ņĀ£ņĪ░ĒĢ£ ņ┤Ø 9ņ×Éņ£ĀļÅäļź╝ ņĖĪņĀĢĒĢĀ ņłś ņ׳ļŖö LSM9DS1ņØä ņäĀņĀĢĒĢśņśĆļŗż (Fig. 1). ļ│Ė ņä╝ņä£ļŖö ņé╝ņ░©ņøÉ Ļ│ĄĻ░äņŚÉņä£ Ļ░ĆņåŹļÅä 3ņ▒äļäÉ, Ļ░üņåŹļÅäļź╝ ņĖĪņĀĢĒĢśĻĖ░ ņ£äĒĢ£ ņ×ÉņØ┤ļĪ£ņŖżņĮöĒöä 3ņ▒äļäÉ ĻĘĖļ”¼Ļ│Ā ļéśņ╣©ĒīÉ ņŚŁĒĢĀņØä ĒĢśļŖö ņ¦Ćņ×ÉĻ│ä 3ņ▒äļäÉļĪ£ ĻĄ¼ņä▒ļÉśņ¢┤ ņ׳ļŗż (ņØ╝ļ¬ģ MARG ņä╝ņä£ļØ╝Ļ│Ā ņ╣ŁĒĢ©). ĻĘĖļ”¼Ļ│Ā Arduino ļ│┤ļō£ņŚÉ ņŚ░Ļ▓░ĒĢśņŚ¼ ņé¼ņÜ®ĒĢĀ ņłś ņ׳ņ£╝ļ®░ ļŹ░ņØ┤Ēä░ ļÅģņĘ© ļØ╝ņØ┤ļĖīļ¤¼ļ”¼Ļ░Ć ņל ņĀ£Ļ│ĄļÉśņ¢┤ ņ׳ļŗż. ņĢäļæÉņØ┤ļģĖņÖĆņØś ņŚ░Ļ▓░ņØĆ QWIIK ņ╝ĆņØ┤ļĖöļĪ£ ĒĢśĻ▓ī ļÉśņ¢┤ ņ׳ņ£╝ļéś ņé¼ņÜ®ņ×ÉĻ░Ć ņøÉĒĢĀ Ļ▓ĮņÜ░ ņØ╝ļ░ś ņĀÉĒŹ╝ņäĀņ£╝ļĪ£ ĒżĒŖĖĻ░ä ņŚ░Ļ▓░ļÅä Ļ░ĆļŖźĒĢśļŗż. ļ│Ė Ļ░ĆņåŹļÅäĻ│äļŖö ĒĢ£ļ│ĆņØ┤ ņĢĮ 2.4 cm ņĀĢļÅäņØś ņåīĒśĢņ£╝ļĪ£ņä£ ņĄ£ļīĆ ┬▒ 16 gņØś ņĖĪņĀĢņØ┤ Ļ░ĆļŖźĒĢśļŗż. ņåīĒśĢ Ļ▓Įļ¤ēņ£╝ļĪ£ņä£ Fig. 1ņØś GNSS ņĢłĒģīļéśņÖĆ ĒĢ©Ļ╗ś ņäżņ╣śļ®┤ņĀüņØ┤ ņ×æņØĆ ņä╝ņä£ĒĢ®ļ│ä ļ¬©ļōłņØä ĒÜ©Ļ│╝ņĀüņ£╝ļĪ£ ĻĄ¼ņä▒ĒĢĀ ņ׳ļŗż.
2.2 ļ¬©ļōł ĻĄ¼ņä▒ ļ░Å ļŹ░ņØ┤Ēä░ ļÅģņĘ©
2.2.1 ļ¬©ļōł ĻĄ¼ņä▒
Ļ│äņĖĪļ¬©ļōłņØĆ GNSS ļ¬©ļōłĻ│╝ IMU ļ¬©ļōłļĪ£ ĻĄ¼ņä▒ļÉśļ®░ ņäĖļČĆ ĻĄ¼ņä▒ņØĆ Fig. 2ņÖĆ Ļ░Öļŗż.
GNSS ņä╝ņä£ņØĖ ZED-F9PņŚÉļŖö ņŗ£ļ”¼ņ¢╝ ĒżĒŖĖņØĖ 1Ļ░£ņØś UART1, 2Ļ░£ņØś UART2Ļ░Ć ņןņ░®ļÉśņ¢┤ ņ׳ņ£╝ļ®░ ĻĘĖļ”¼Ļ│Ā 1Ļ░£ņØś USB ĒżĒŖĖĻ░Ć ĻĄ¼ļ╣äļÉśņ¢┤ ņ׳ļŗż. ņØ┤ņżæ UART1ņØĆ GNSSņØś nmea ņŗ£ĻĘĖļäÉņØä ļÅģņĘ©ĒĢśļ®░ USBļŖö GNSSņØś ņøÉņŗ£ ņŗ£ĻĘĖļäÉ (raw signal)ņØä ļÅģņĘ©ĒĢśļÅäļĪØ ņäżņĀĢĒĢśņśĆļŗż. FTDIļŖö ļŹ░ņØ┤Ēä░ņØś ņŗ£ļ”¼ņ¢╝ ņĀäņåĪņØä USB ņĀäņåĪņ£╝ļĪ£ ļ░öĻŠĖĻĖ░ ņ£äĒĢ£ ļ│ĆĒÖśĻĖ░ņØ┤ļŗż. UART2ļŖö ĻĄŁĒåĀņ¦Ćļ”¼ņĀĢļ│┤ņøÉņØś NTRIP ņä£ļ╣äņŖż1)ļĪ£ ļČĆĒä░ņØś RTCM ņŗ£ĻĘĖļäÉņØä ņĀäļŗ¼ļ░øĻĖ░ ņ£äĒĢśņŚ¼ Bluetooth ļ¬©ļōłņØĖ HC-06ņØä ņŚ░Ļ▓░ĒĢśņśĆļŗż. IMU ņä╝ņä£ LSM9DS1ņØĆ ņĢäļæÉņØ┤ļģĖņÜ░ļģĖ ļ│┤ļō£ņŚÉ ņŚ░Ļ▓░ļÉśņ¢┤ ņ׳ņ£╝ļ®░ Ļ│äņĖĪņŗ£ĻĘĖļäÉņØĆ USB ņ╝ĆņØ┤ļĖöļĪ£ ņ╗┤Ēō©Ēä░ņŚÉ ņĀäļŗ¼ļÉ£ļŗż. ņ×æļÅÖņāüĒā£ņØś ņä╝ņä£ ņ£ĄĒĢ® ļ¬©ļōłņØś ņĪ░ĒĢ®ņØä Fig. 3ņŚÉ ņĀ£ņŗ£ĒĢśņśĆļŗż. Fig. 4ļŖö ņ×æļÅÖņāüĒā£ņŚÉņä£ U-centerĻ░Ć ļ│┤ņŚ¼ņŻ╝ļŖö GNSS ņ£äņä▒ļōżņØś ļČäĒżļÅäņØ┤ļŗż.
2.2.2 ļŹ░ņØ┤Ēä░ ļÅģņĘ©
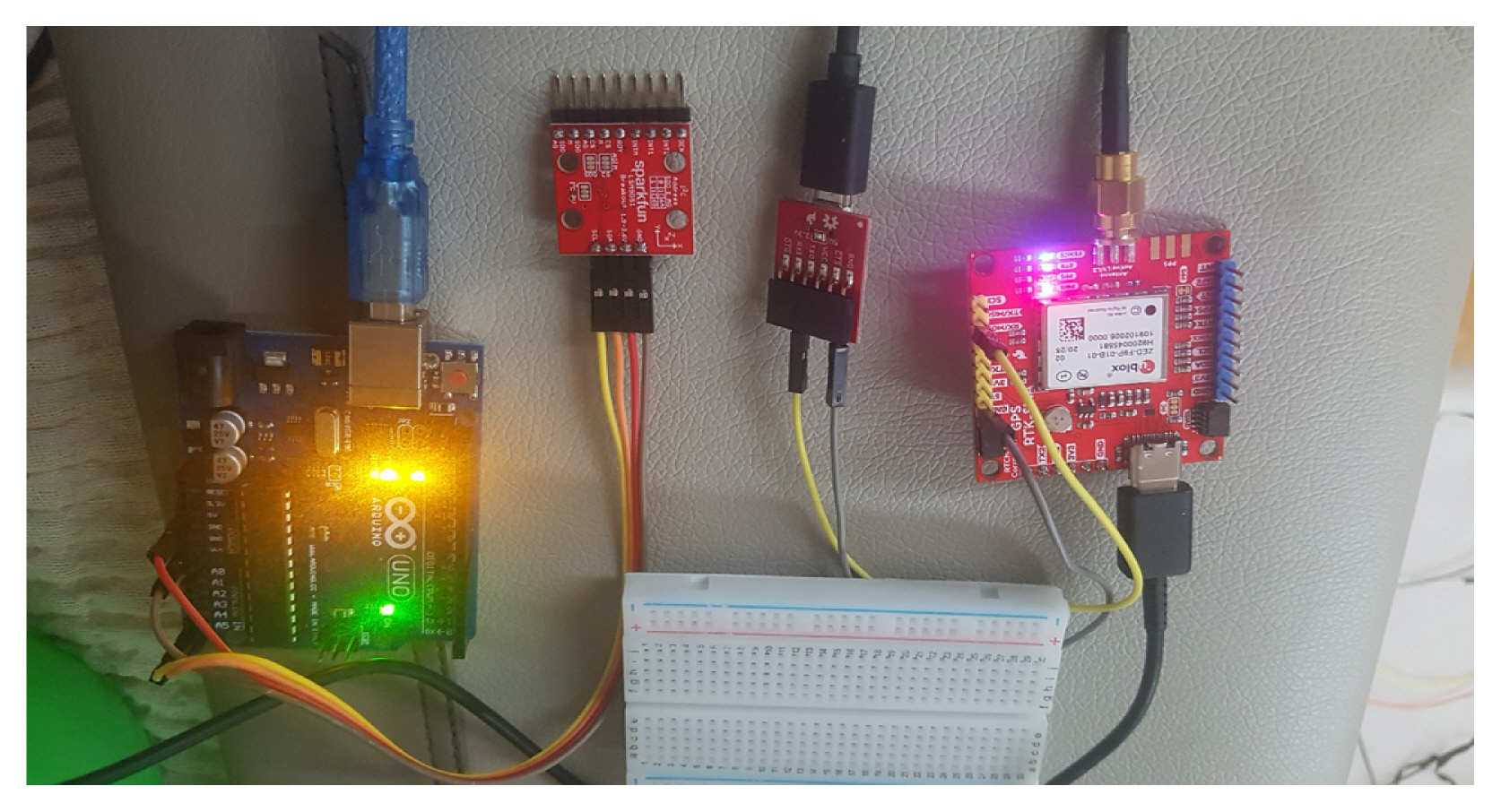
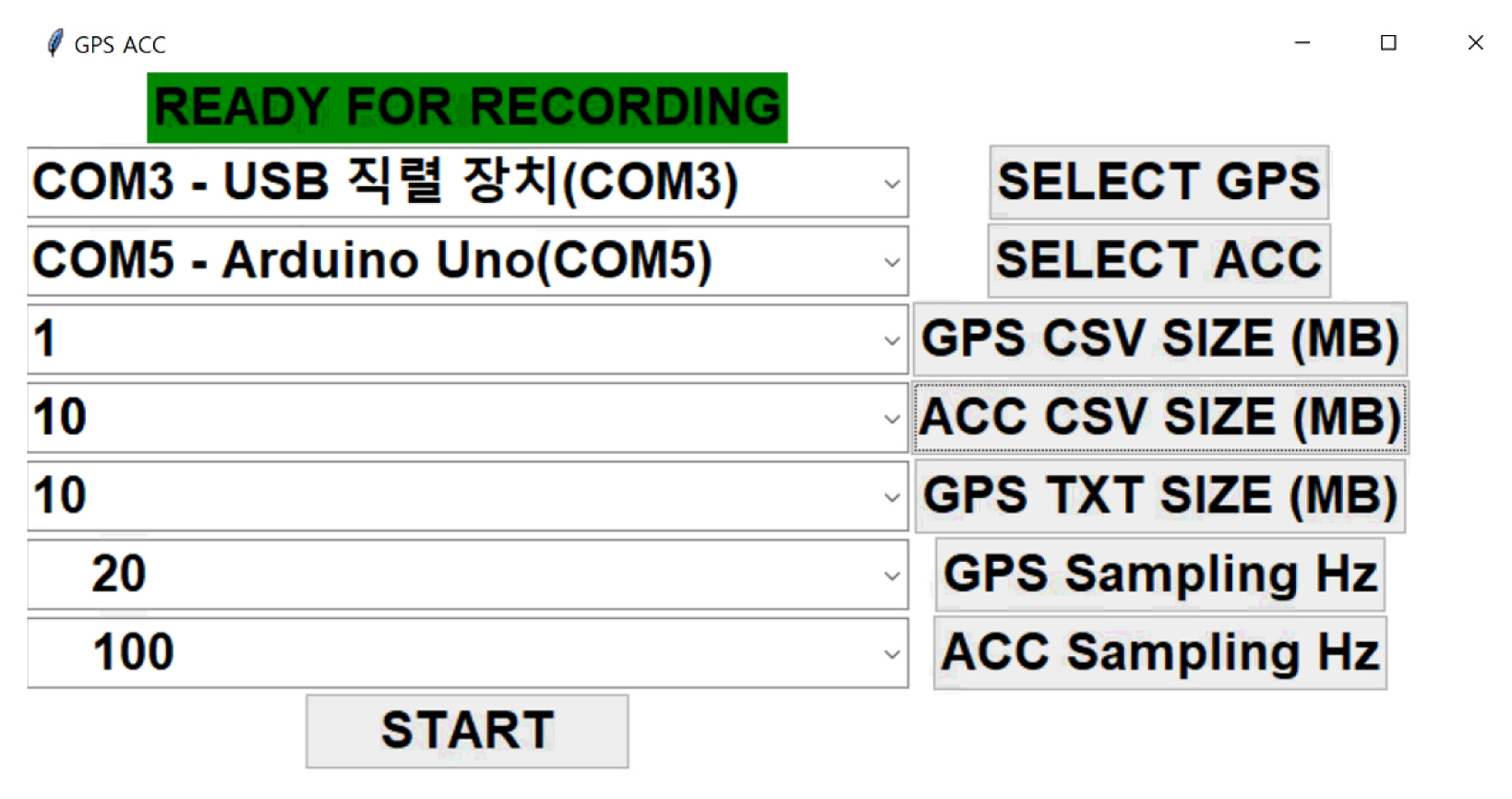
ļÅģņĘ© ņåīĒöäĒŖĖņø©ņ¢┤ļŖö IMUļź╝ ņĀ£ņ¢┤ĒĢśĻĖ░ ņ£äĒĢ£ ņĢäļæÉņØ┤ļģĖ ņĮöļō£ņÖĆ GNSSņØś UART1ņØä ņĀ£ņ¢┤ĒĢśĻĖ░ ņ£äĒĢ£ ĒīīņØ┤ņŹ¼ ņĮöļō£ļź╝ Ļ▓░ĒĢ®ĒĢśņŚ¼ ņ×æņä▒ĒĢśņśĆļŗż. ņåīĒöäĒŖĖņø©ņ¢┤ļź╝ ĻĄ¼ļÅÖĒĢśļ®┤ Fig. 5ņÖĆ Ļ░ÖņØĆ ĒÖöļ®┤ņØ┤ ļ£©ļ®░ ņŚ¼ĻĖ░ņŚÉņä£ Ļ░ü ņä╝ņä£ņØś ĒĢ┤ļŗ╣ portņÖĆ ļÅģņĘ©ņ£© ĻĘĖļ”¼Ļ│Ā 1Ļ░£ Ļ│äņĖĪĒīīņØ╝ņØś Ēü¼ĻĖ░ļź╝ ņ¦ĆņĀĢĒĢĀ ņłś ņ׳ļŗż. ĒīīņØ╝ Ēü¼ĻĖ░ļŖö MB ļŗ©ņ£äļĪ£ ņ×ģļĀźĒĢśļ®░ ļŹ░ņØ┤Ēä░ļ¤ēņØ┤ ļŗż ņ▒äņøīņ¦Ćļ®┤ ņ×ÉļÅÖņĀüņ£╝ļĪ£ ĒīīņØ╝ ļ¬ģņØä ļ░öĻŠĖņ¢┤ ņĀĆņןļÉśļÅäļĪØ ĒĢśņśĆļŗż. Ļ░ü ĒīīņØ╝ņØĆ ņāØņä▒ļÉśļŖö ņŚ░ņøöņØ╝ņŗ£ļČäņØ┤ ĒīīņØ╝ ļ¬ģņŚÉ Ēæ£ņŗ£ļÉśļÅäļĪØ ĒĢśņśĆļŗż. GNSSņÖĆ IMUņØś ļŹ░ņØ┤Ēä░ ĒīīņØ╝ ņ▓½ ņ╗¼ļ¤╝ņØĆ ņ╗┤Ēō©Ēä░ ļÅģņĘ©ļŗ╣ņŗ£ ņäĖĻ│äĒśæņĀĢņŗ£ (UTC)ļź╝ ļéśĒāĆļé┤ļ®░ ļæÉ ņä╝ņä£ņØś Ļ│äņĖĪĻ░Æ time-stampļź╝ Ļ│Ąņ£ĀĒĢśļŖö ļ│äļÅäņØś Ļ│äņĖĪ ņåīĒöäĒŖĖņø©ņ¢┤ļź╝ ņ×æņä▒ĒĢśņŚ¼ ļæÉ ņä╝ņä£ Ļ│äņĖĪņØś ļÅÖņŗ£ņä▒ņØä ĻĄ¼ņČĢĒĢĀ ņłś ņ׳ļŗż. GNSSņØś ļæÉ ļ▓łņ¦Ė ņ╗¼ļ¤╝ņØĆ ņ£äņä▒ (GNGGA)ņØ┤ ļ¼╝ņ▓┤ņØś ņ£äņ╣śļź╝ Ēżņ░®Ē¢łņØä ļĢīņØś UTCņØ┤ļ®░ ņ╗┤Ēō©Ēä░ ļÅģņĘ©ņŗ£Ļ░üļ│┤ļŗż ņĢĮĻ░ä ņĢ×ņäĀļŗż. ĻĘĖ ļŗżņØī ņ╗¼ļ¤╝ļōżņØĆ ņ░©ļĪĆļĪ£ ņ£äļÅä, Ļ▓ĮļÅä ĻĘĖļ”¼Ļ│Ā Ļ│ĀļÅä (ņ¦ĆņśżņØ┤ļō£ļ®┤ ĻĖ░ņżĆ)ļź╝ ļéśĒāĆļéĖļŗż. ĒĢ£ĒÄĖ, Ļ┤Ćņä▒ņä╝ņä£ņØś Ļ│äņĖĪņØĆ ņ×ÉļĀźĻ│ä (magnetometer)ņØś ņŗ£ĻĘĖļäÉņØä ĒżĒĢ©ĒĢśņŚ¼ 9ņ×Éņ£ĀļÅäņØś ņŗ£ĻĘĖļäÉņØä ņČ£ļĀźĒĢśļéś ļ│Ė ņä╝ņä£ņ£ĄĒĢ®ņØś Ļ│äņé░ņŚÉņä£ļŖö Ļ░ĆņåŹļÅäņÖĆ Ļ░üņåŹļÅä ņØś 6ņ×Éņ£ĀļÅäņØś ņŗ£ĻĘĖļäÉļ¦ī ņØ┤ņÜ®ĒĢśņśĆļŗż.
GNSSņØś USBĒżĒŖĖļĪ£ ļČĆĒä░ņØś ņøÉņŗ£ ņŗ£ĻĘĖļäÉ (raw data)ņØĆ GNSS ņåīĒöäĒŖĖņø©ņ¢┤ Ēī®Ēéżņ¦ĆņØĖ RTKLIBļź╝ ņé¼ņÜ®ĒĢśņŚ¼ ļÅģņĘ©ĒĢśņśĆļŗż. RTKLIBļŖö ļŗ╣ņ┤ł Takasu et al. (2007)ņØ┤ Ļ░£ļ░£ĒĢśņśĆņ£╝ļ®░ Ļ┤ĆļĀ© ņØĖĒä░ļäĘ ņé¼ņØ┤ĒŖĖ2)ņŚÉņä£ ņåīĒöäĒŖĖņø©ņ¢┤ ļ░Å ņÜ┤ņśüņŚÉ Ļ┤ĆĒĢ£ ļ¬©ļōĀ ņĀĢļ│┤ļź╝ ņĀ£Ļ│ĄĒĢśĻ│Ā ņ׳ļŗż. Everett (2020)ļŖö ņØ┤ļź╝ ĻĖ░ļ░śņ£╝ļĪ£ ĒĢśņŚ¼ ņŻ╝ļĪ£ u-bloxņé¼ņØś GNSS ņłśņŗĀĻĖ░ņØś ņé¼ņÜ®ĒĢśĻĖ░ ņ£äĒĢ£ ĒöäļĪ£ĻĘĖļש DEMO 5 ļ░Å Ļ┤ĆļĀ© ņĀĢļ│┤ļź╝ ņĀ£Ļ│ĄĒĢśĻ│Ā ņ׳ļŗż3). ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö DEMO 5ņŚÉņä£ņØś STRVTRļź╝ ņé¼ņÜ®ĒĢśņŚ¼ ņøÉņŗ£ ņŗ£ĻĘĖļäÉņØä ļÅģņĘ©ĒĢśņśĆļŗż. ļÅģņĘ©ņŚÉ ņĢ×ņä£ ņåīĒöäĒŖĖņø©ņ¢┤ U-center ļé┤ņŚÉņä£ ļÅģņĘ© ņé¼ņ¢æņØä ļ©╝ņĀĆ ņäżņĀĢĒĢ£ Ēøä GNSS ļÅģņĘ©ļź╝ ņŗ£ņ×æĒĢśņśĆļŗż. ļÅģņĘ©ļÉ£ ņøÉņŗ£ ņŗ£ĻĘĖļäÉņØĆ RTKCONVļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ RINEXļĪ£ ĒīīņØ╝ļĪ£ ļ│ĆĒÖśĒĢ£ ļÆż CSRS-PPP4) ņä£ļ╣äņŖżņŚÉ ņĀäņåĪĒĢśņŚ¼ Ēøäņ▓śļ”¼ļÉ£ ļŹ░ņØ┤Ēä░ļź╝ ņĀäņåĪļ░øļŖö ņŗØņ£╝ļĪ£ ĒĢśņśĆļŗż.
3. ņä╝ņä£ņ£ĄĒĢ® ļ¬©ļōłņØś ņä▒ļŖźņŗżĒŚś
3.1 ņŗżĒŚś Ļ░£ņÜö
ņĀ£2ņĀłņŚÉņä£ ņłśļ”ĮĒĢ£ GNSS-IMU ņä╝ņä£ņ£ĄĒĢ®ņØś ņĀĢĒÖĢņä▒ņØä Ļ▓ĆĒåĀĒĢśĻĖ░ ņ£äĒĢśņŚ¼ ņłśĒÅē ņ╝äĒŗĖļĀłļ▓ä ņŗØ ļ¬©ĒśĢĻĄ¼ņĪ░ļ¼╝ņØś ņ¦äļÅÖņØä Ļ│äņĖĪĒĢśļŖö ņä▒ļŖźņŗżĒŚśņØä ņłśĒ¢ēĒĢśņśĆļŗż. ņä▒ļŖźņŗżĒŚśņØĆ ĒĢ£ĻĄŁĒĢ┤ņ¢æĻ│╝ĒĢÖĻĖ░ņłĀņøÉņØś ņĀ£ 4ņŚ░ĻĄ¼ļÅÖ ņśźņāü (ņ£äļÅä 35.076ļÅä, Ļ▓ĮļÅä 129.080ļÅä)ņŚÉņä£ ņłśĒ¢ēĒĢśņśĆļŗż. ņŗżĒŚśņØĆ Fig. 6ņŚÉņä£ ļ│┤ņØ┤ļŖö ļ░öņÖĆ Ļ░ÖņØ┤ ņ║öĒŗĖļĀłļ▓ä ņŗØ ļ│┤ņØś ļüØņŚÉ GNSS ņĢłĒģīļéśņÖĆ IMUļź╝ ļÅÖņŗ£ ņäżņ╣śĒĢśĻ│Ā ņØĖņ£äņĀüņØĖ Ļ░Ćņ¦äņŚÉ ļö░ļźĖ ļ│┤ņØś ņ¦äļÅÖņØä ņĖĪņĀĢĒĢśņśĆļŗż. ņ¦äļÅÖņŚÉ ļö░ļźĖ ļ│Ćņ£äņØś ņ░Ė Ļ░ÆņØĆ ņŗżĒŚśĻĄ¼ņĪ░ļ¼╝ ļ░æņŚÉ ņäżņ╣śļÉśņ¢┤ ņ׳ļŖö ļĀłņØ┤ņĀĖ ļ│Ćņ£äĻ│ä (KL4-250NV)ļĪ£ ņĖĪņĀĢĒĢśņśĆļŗż. Fig. 7ņØĆ ņŗżĒŚśņןņ╣śņØś ņé¼ņ¦äņØ┤ļŗż. ĻĄ¼ņĪ░ļ¼╝ ļüØ ņ£Śļ®┤ņŚÉ GNSS ņĢłĒģīļéśņÖĆ IMUĻ░Ć ņäżņ╣śļÉśņ¢┤ ņ׳ņ£╝ļ®░ ļ░æļ®┤ņØĆ ļĀłņØ┤ņĀĖ ļ│Ćņ£äĻ│äļĪ£ ļČĆĒä░ņØś ļĀłņØ┤ņĀĖ Ļ┤æņäĀņØ┤ ļ╣äņČöĻ│Ā ņ׳ņØīņØä ļ│╝ ņłś ņ׳ļŗż.
3.2 ņŗżĒŚś ĻĄ¼ņĪ░ļ¼╝
ņŗżĒŚśņŚÉ ņé¼ņÜ®ļÉ£ ņ╝äĒŗĖļĀłļ▓ä ļ│┤ļŖö ļØĀ ļ¬©ņ¢æ ņ▓ĀĒīÉņ£╝ļĪ£ņä£ ņØ┤ļōżņØś ĻĖĖņØ┤ļź╝ ļŗ¼ļ”¼ĒĢśņŚ¼ Table 3Ļ│╝ Ļ░ÖņØ┤ ņäżņĀĢĒĢśņśĆļŗż. Ēæ£ņŚÉņä£ Ļ│Āņ£Ā ņŻ╝ĒīīņłśļŖö ļ│┤ņØś ņŚ░ņ¦üņÜ┤ļÅÖņŚÉ ļīĆĒĢ£ Ļ▓āņ£╝ļĪ£ņä£ ņ▓ĀĒīÉņØś ļ░ĆļÅä 7,800 kg/m3, Ēāäņä▒Ļ│äņłś 200 Gpaļź╝ ņé¼ņÜ®ĒĢśņŚ¼ ļŗżņØī ņŗØņ£╝ļĪ£ Ļ│äņé░ĒĢśņśĆļŗż (Young and Budynas, 2002). ņŚ¼ĻĖ░ņä£ mņØĆ ļŗ©ņ£äĻĖĖņØ┤ ļŗ╣ ļ│┤ņØś ņ¦łļ¤ēņØä ņØśļ»ĖĒĢ£ļŗż.
3.3 ņŗżĒŚśņĢł ņäżņĀĢ
ņŗżĒŚśņØĆ ļÅÖņØ╝ ņŗżĒŚśĻĄ¼ņĪ░ļ¼╝ņŚÉ ļīĆĒĢśņŚ¼ GNSS ļŗ©ļÅģĻ┤ĆņĖĪ, VRS RTK Ļ┤ĆņĖĪ5) ĻĘĖļ”¼Ļ│Ā PPP Ļ┤ĆņĖĪ ļō▒ ņäĖĻ░Ćņ¦Ć ņŗżĒŚśņĢłņŚÉ ļīĆĒĢśņŚ¼ ņłśĒ¢ēĒĢśņśĆļŗż.
3.4 Ļ│äņĖĪļ░®ļ▓Ģ
GNSSļŖö ļ¬©ļōĀ ņŗżĒŚśņĢłņŚÉ ļīĆĒĢśņŚ¼ 20 HzļĪ£ ļÅģņĘ©ĒĢśņśĆļŗż. IMUņÖĆ Laser ļ│Ćņ£äĻ│äļŖö Ļ░üĻ░ü 100 HzņÖĆ 200 HzļĪ£ ļÅģņĘ©ĒĢśņśĆļŗż. GNSS ļŗ©ļÅģĻ│äņĖĪĻ│╝ RTKĻ┤ĆņĖĪņŚÉņä£ļŖö ņĢ×ņä£ ņäżļ¬ģĒĢ£ Ļ│äņĖĪ ņåīĒöäĒŖĖņø©ņ¢┤ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ NMEA ņŗ£ĻĘĖļäÉņØä ļÅģņĘ©ĒĢśņśĆņ£╝ļ®░ PPP Ļ│äņĖĪņŚÉņä£ņØś ņøÉņŗ£ GNSS ņŗ£ĻĘĖļäÉ (raw data)ņØĆ ļ│äļÅäņØś ņåīĒöäĒŖĖņø©ņ¢┤ņØĖ strsvrļź╝ ņé¼ņÜ®ĒĢśņŚ¼ ļÅģņĘ©ĒĢśņśĆļŗż.
4. Ļ▓░Ļ│╝ ļ░Å ļČäņäØ
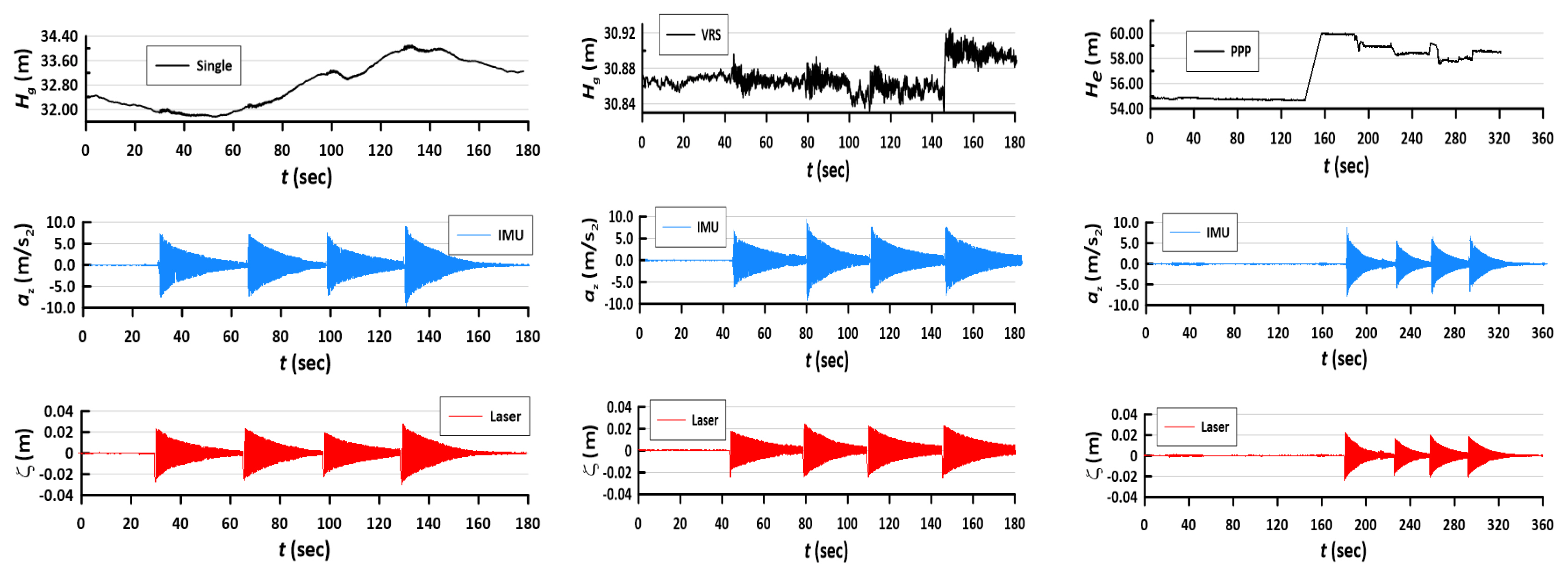
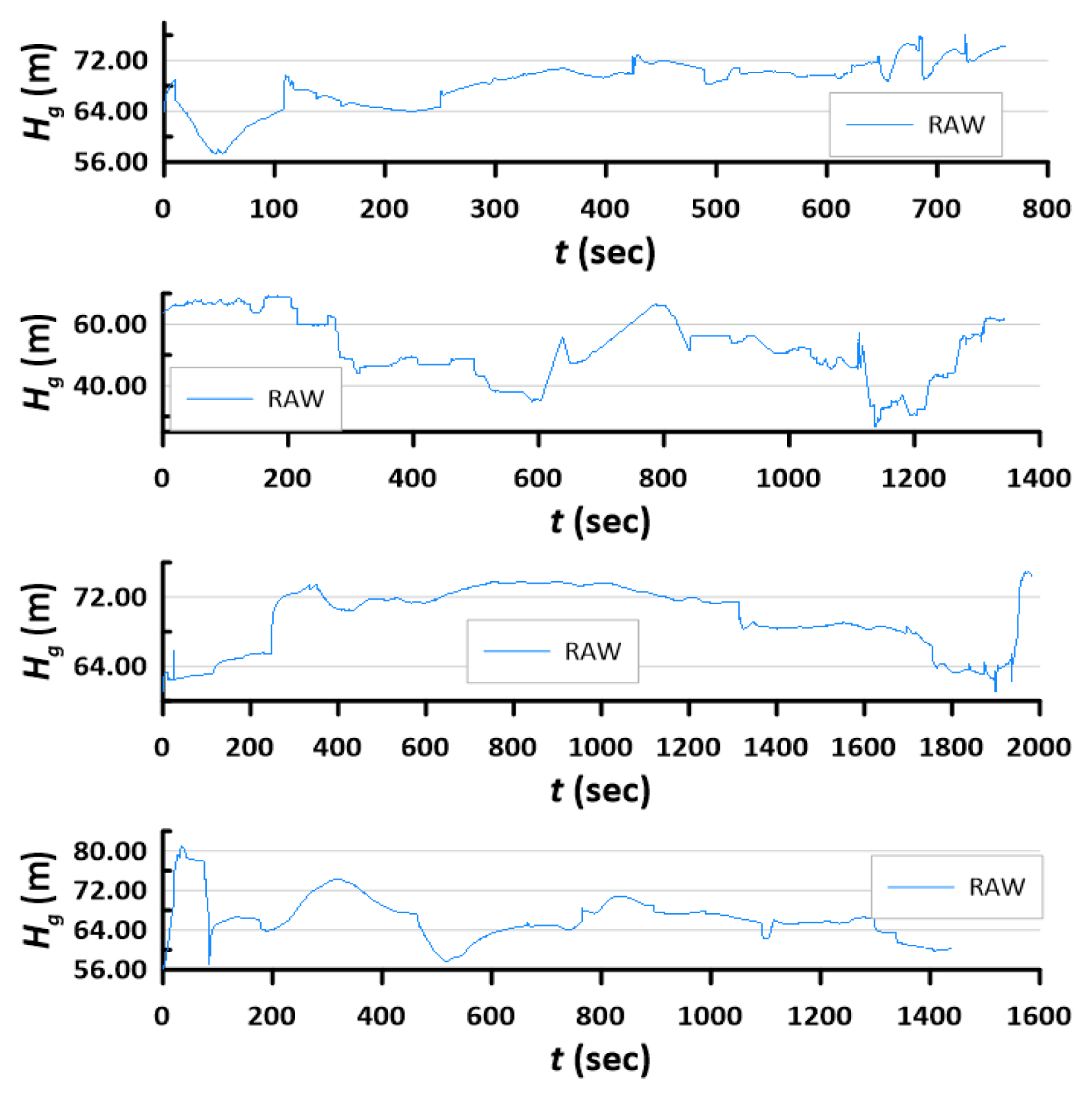
Table 3ņØś GNSSņØś ļŗ©ļÅģņĖĪņ£ä (Single), VRS RTK ņĖĪņ£ä, ĻĘĖļ”¼Ļ│Ā ņĀĢļ░Ćļŗ©ļÅģņĖĪņ£ä (PPP)ņØś Ļ▓░Ļ│╝ļź╝ ļČäņäØĒĢśņśĆļŗż. ņØ┤ņżæ ļīĆĒæ£ņĀüņ£╝ļĪ£ EXP-1ņØś Ļ│äņĖĪ Ļ▓░Ļ│╝ļź╝ Fig. 8ņŚÉ ņĀ£ņŗ£ĒĢśņśĆļŗż. Ļ░ü ĻĘĖļ”╝ļōżņŚÉļŖö ļ¬©ĒśĢĻĄ¼ņĪ░ļ¼╝ņŚÉ ļīĆĒĢ£ ņØĖņ£äņĀü Ļ░Ćņ¦ä ņŗ£ĻĘĖļäÉņØś ņ░Ė Ļ░ÆņØä ņĀ£Ļ│ĄĒĢśļŖö ļĀłņØ┤ņĀĖ ļ│Ćņ£äĻ│äņØś Ļ│äņĖĪņŗ£ĻĘĖļäÉĻ│╝ ĻĘĖļ”¼Ļ│Ā IMUņØś ņŚ░ņ¦üĻ░ĆņåŹļÅä ņŗ£ĻĘĖļäÉļÅä Ļ░ÖņØ┤ ļÅäņŗ£ļÉśņ¢┤ ņ׳ļŗż.
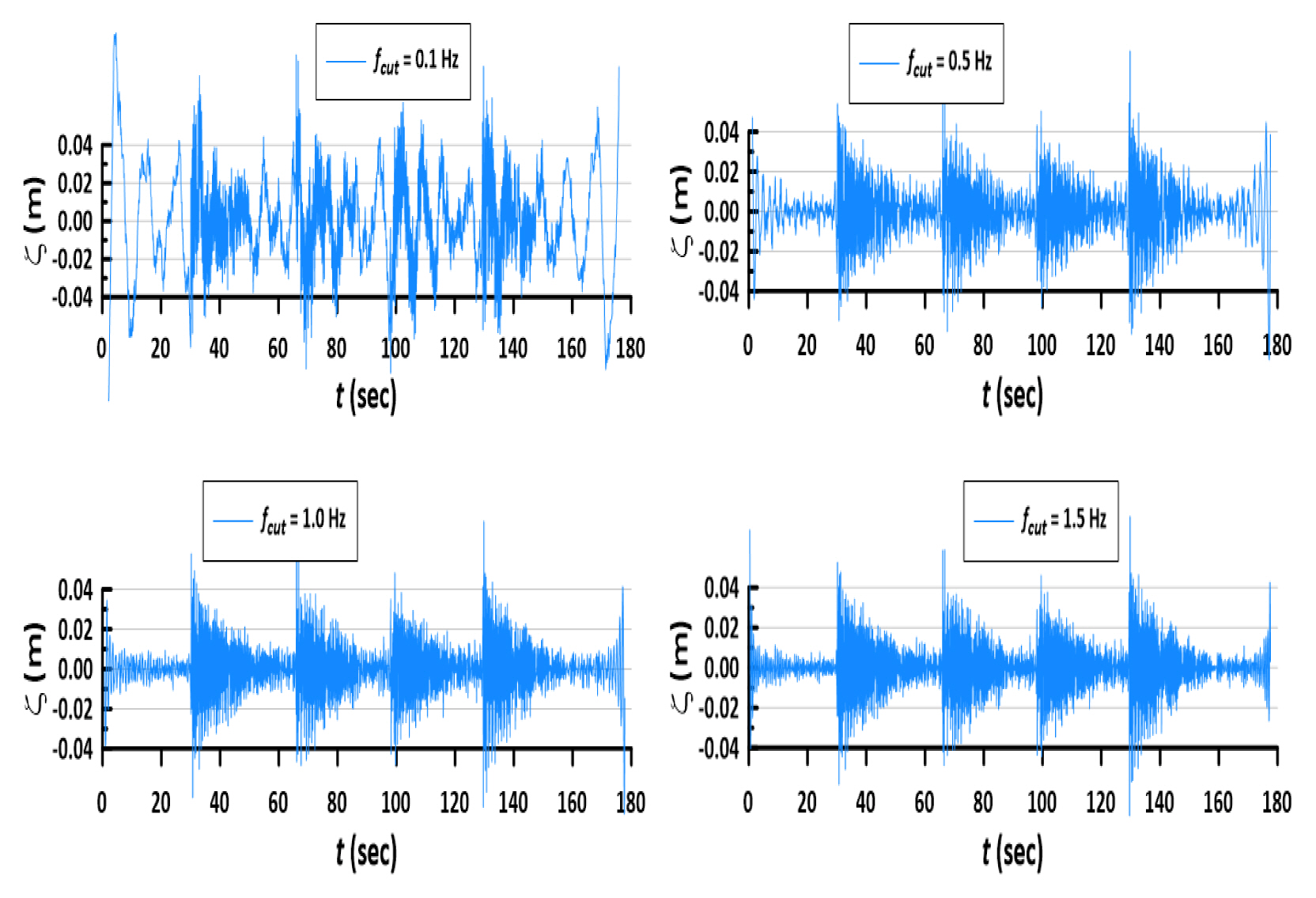
Fig. 8ņŚÉņä£ HgļŖö GNSS ņŚ░ņ¦üļ░®Ē¢ź ļ│Ćņ£ä (Ļ│ĀļÅä), azļŖö IMU ņŚ░ņ¦üļ░®Ē¢ź Ļ░ĆņåŹļÅä, ╬ČļŖö ļĀłņØ┤ņĀĆ ļ│Ćņ£äĻ│ä Ļ░ÆņØä ļéśĒāĆļéĖļŗż. GNSS ņŗ£ĻĘĖļäÉļōżņØä ļ│┤ļ®┤ VRS-RTKņØś ņŗ£ĻĘĖļäÉņØĆ ĻĄ¼ņĪ░ļ¼╝ ņ¦äļÅÖņØ┤ ņל ļéśĒāĆļéś ņ׳ņ£╝ļ®░ Single GNSSņŚÉņä£ļÅä ĻĘĖļ”╝ņØä ĒÖĢļīĆĒĢśņŚ¼ ļ│┤ļ®┤ ņ¦äļÅÖņØś ņ¢æņāüņØä ļ│╝ ņłś ņ׳ļŗż. ĻĘĖļ¤¼ļéś PPP ņĖĪņ£äņŚÉņä£ļŖö ņ¦äļÅÖņØś ĒØöņĀüņØ┤ ļ¦żņÜ░ ļ»Ėļ»ĖĒĢśĻ▓ī ļéśĒāĆļéś ņ׳ļŗż. ļśÉĒĢ£, ņØ┤ļōż GNSS ņŗ£ĻĘĖļäÉļōżņŚÉņä£ļŖö Ļ│ĄĒåĄņĀüņ£╝ļĪ£ ņŗ£Ļ░äņ¦äĒ¢ēņŚÉ ļö░ļźĖ Ēæ£ļźśĒśäņāü (drift)ņØ┤ ļ░£ņāØĒĢ©ņØä ļ│╝ ņłś ņ׳ļŗż. ņØ┤ ĒśäņāüņØĆ ĻĄ¼ņĪ░ļ¼╝ņØś ņŗżņĀ£ ļ│Ćņ£äĻ░Ć ņĢäļŗłļ®░ GNSS ņĖĪņĀĢņŚÉ ĻĘ╝ņøÉņĀüņ£╝ļĪ£ ļé┤ņ×¼ĒĢśļŖö ņśżņ░©ņŚÉņä£ ļ╣äļĪ»ļÉ£ Ļ▓āņØ┤ļŗż. ļö░ļØ╝ņä£, ĻĄ¼ņĪ░ļ¼╝ņØś ņŗżņĀ£ ļ│Ćņ£äļ¦īņØä ļÅäņČ£ĒĢśĻĖ░ ņ£äĒĢśņŚ¼ Ļ│äņĖĪņŗ£ĻĘĖļäÉņŚÉ Ļ│ĀņŻ╝Ēīī ĒåĄĻ│╝ĒĢäĒä░ļź╝ ņĀüņÜ®ĒĢśņśĆļŗż. Fig. 9ļŖö EXP-1ņØś Single GNSSņØś Ļ│äņĖĪĻ▓░Ļ│╝ņŚÉ ļīĆĒĢ┤ņä£ ĒĢäĒä░ņØś ņ░©ļŗ©ņŻ╝Ēīīņłś (cut-off frequency) fcutļź╝ ļŗ¼ļ”¼ĒĢśņŚ¼ ĒĢäĒä░ļź╝ ņĀüņÜ®ĒĢ£ Ļ▓░Ļ│╝ļź╝ ļ│┤ņŚ¼ņżĆļŗż. fcut Ōē¦ 0.5 HzņŚÉņä£ Fig. 8ņØś Laser meterņØś Ļ▓░Ļ│╝ņÖĆ ņ£Āņé¼ĒĢ£ ļ│Ćņ£äņŗ£ĻĘĖļäÉņØ┤ ļÅäņČ£ļÉ©ņØä ļ│╝ ņłś ņ׳ļŗż. ļö░ļØ╝ņä£, ņČöĒøä ļČäņäØņŚÉņä£ļŖö ļ¬©ļōĀ ņŗżĒŚśņĢł Ļ│ĄĒ׳ fcut = 1.0 HzņØä ņĀüņÜ®ĒĢśņśĆļŗż.
EXP-1ņØś ņäĖĻ░Ćņ¦Ć GNSS ņĖĪņ£äļ░®ļ▓ĢņØś Ļ░üĻ░üņŚÉ ļīĆĒĢśņŚ¼ ļĀłņØ┤ņĀĖ ļ│Ćņ£äĻ│äņØś ņĖĪņĀĢĻ▓░Ļ│╝, Ļ│ĀņŻ╝Ēīī ĒåĄĻ│╝ĒĢäĒä░ņØś ņĀüņÜ®Ļ▓░Ļ│╝, ĻĘĖļ”¼Ļ│Ā ņä╝ņä£ņ£ĄĒĢ® Ļ▓░Ļ│╝ļź╝ Fig. 10ņŚÉ ņĀ£ņŗ£ĒĢśņśĆļŗż. Ļ│ĀņŻ╝Ēīī ĒåĄĻ│╝ĒĢäĒä░ņØś Ļ▓░Ļ│╝ļź╝ ļ│┤ļ®┤ ļĀłņØ┤ņĀĖ ļ│Ćņ£äĻ│äņØś ņŗ£ĻĘĖļäÉĻ│╝ ļ╣äĻĄÉĒĢśņŚ¼ Single GNSSļŖö ņ¦äĒÅŁņØ┤ ņĢĮ ļæÉļ░░ņĀĢļÅä Ēü¼Ļ▓ī ļéśļ®░, VRS-RTKļŖö Ļ▒░ņØś ņ£Āņé¼ĒĢ£ Ļ▓░Ļ│╝ļź╝ ļ│┤ņŚ¼ņżĆļŗż. ņØ┤ņÖĆ Ļ░ÖņØĆ ņĀÉņØä ļ│╝ ļĢī, ņ£Īņ¦ĆņÖĆ ĒåĄņŗĀņØ┤ Ļ░ĆļŖźĒĢśņŚ¼ ĒĢ┤ņĢłņŚŁņØś VRS ņŗ£ĻĘĖļäÉņØ┤ ĒåĄļŗ¼ĒĢĀ ņłś ņ׳ļŖö ĻĘ╝Ļ▒░ļ”¼ ĒĢ┤ņŚŁņŚÉņä£ļŖö ļ│Ė VRS-RTK ņĖĪņ£äļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ĻĄ¼ņĪ░ļ¼╝ņŚÉ ļ░£ņāØĒĢśļŖö ļ│Ćņ£äļź╝ ņČ®ļČäĒ׳ ņל Ēżņ░®ĒĢĀ ņłś ņ׳ņØä Ļ▓āņ£╝ļĪ£ ļ│┤ņØĖļŗż. ĻĘĖļ¤¼ļéś, PPP ņĖĪņ£äļŖö ĻĖ░ļīĆņÖĆļŖö ļŗ¼ļ”¼ Ļ░Ćņ¦äņØś ĒØöņĀüņØ┤ ņāüļīĆņĀüņ£╝ļĪ£ ļ¦żņÜ░ ļ»Ėļ»ĖĒĢ£ ĒÄĖņØ┤ļŗż. ņØ┤ņŚÉ ļīĆĒĢ┤ņä£ļŖö ĒøäņŚÉ ļŗżņŗ£ ĻĖ░ņłĀĒĢśĻĖ░ļĪ£ ĒĢ£ļŗż.
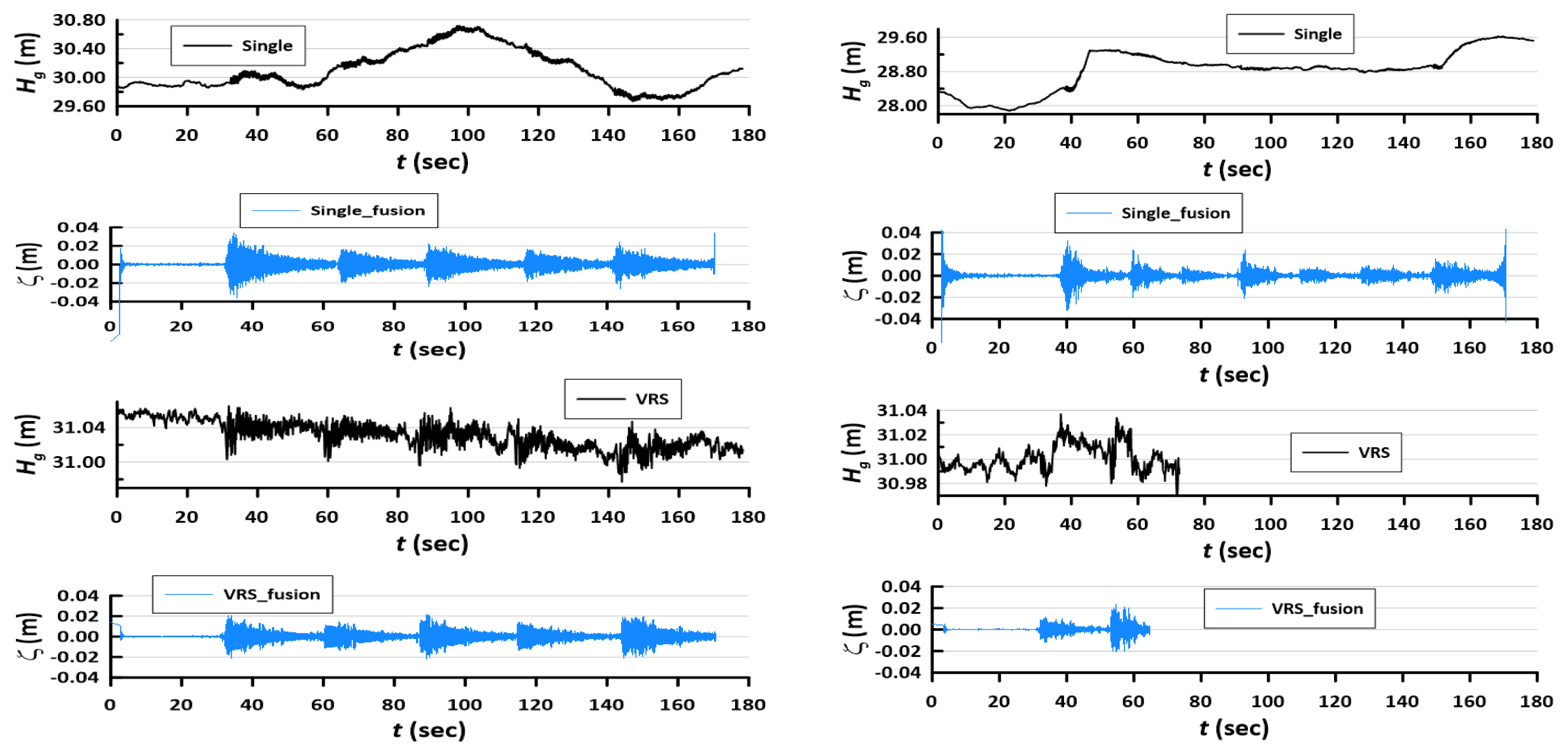
Table 3ņØś EXP-2ņÖĆ EXP-3ņŚÉ ļīĆĒĢśņŚ¼ Single GNSSņÖĆ VRS RTKņØś Ļ│äņĖĪņŗ£ĻĘĖļäÉĻ│╝ ņØ┤ņŚÉ ļīĆĒĢ£ ņä╝ņä£ņ£ĄĒĢ® ņĖĪņ£äņØś Ļ▓░Ļ│╝ļź╝ Fig. 11ņŚÉ Ļ░üĻ░ü ļÅäņŗ£ĒĢśņśĆļŗż. EXP-2ņŚÉņä£ļŖö ņĀäļ░śņĀüņ£╝ļĪ£ Ļ░Ćņ¦ä ņŗ£ĻĘĖļäÉņØ┤ ņל Ļ│äņĖĪļÉśļŖö Ļ▓āņ£╝ļĪ£ ļéśĒāĆļé¼ļŗż. ĻĘĖļ¤¼ļéś, Ļ│Āņ£ĀņŻ╝ĒīīņłśĻ░Ć ļ╣äĻĄÉņĀü Ēü░ EXP-3ņŚÉņä£ļŖö ļŗżņåī ļČłĻĘ£ņ╣ÖņĀüņØĖ Ēī©Ēä┤ņØ┤ ļéśĒāĆļéś ņ׳ņØīņØä ļ│╝ ņłś ņ׳ļŗż. ņØ┤ņÖĆ Ļ░ÖņØĆ ņä▒Ē¢źņØĆ ņä╝ņä£ņ£ĄĒĢ®ņŚÉ ņØśĒĢ£ ļ│Ćņ£äņŗ£ĻĘĖļäÉņØś ĒīīņøīņŖżĒī®ĒŖĖļ¤╝ņØä ļÅäņŗ£ĒĢ£ Fig. 12ņŚÉņä£ļÅä ņל ļéśĒāĆļéś ņ׳ļŗż. EXP-1Ļ│╝ EXP-2ņŚÉņä£ļŖö Ļ│ĄĒ׳ ņ▓©ļæÉņŻ╝ĒīīņłśĻ░Ć ĻĄ¼ņĪ░ļ¼╝ņØś Ļ│Āņ£ĀņŻ╝ĒīīņłśņÖĆ ņ£Āņé¼ĒĢśĻ▓ī ĒśĢņä▒ļÉśņ¢┤ ņ׳ņØīņØä ļ│╝ ņłś ņ׳ņ£╝ļéś EXP-3ņŚÉņä£ļŖö Ļ│Āņ£ĀņŻ╝ĒīīņłśņÖĖņŚÉļÅä ĒāĆ ņä▒ļČäļōżņØ┤ Ēś╝ņ×¼ļÉśņ¢┤ ņ׳ļŗż. ņØ┤ Ļ▓░Ļ│╝ļź╝ ļ│╝ ļĢī GNSSļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ĻĄ¼ņĪ░ļ¼╝ ņ¦äļÅÖņØä Ēżņ░®ĒĢśļŖö Ļ▓āņØĆ ņŻ╝ļĪ£ ņןņŻ╝ĻĖ░ņØ╝ņłśļĪØ ĻĘĖļ”¼Ļ│Ā ņ¦äĒÅŁņØ┤ Ēü┤ņłśļĪØ ņ£Āļ”¼ĒĢśļ®░, ĻĄ¼ņĪ░ļ¼╝ņØś Ļ│Āņ£ĀņŻ╝ĒīīņłśĻ░Ć ņ”ØĻ░ĆĒĢĀņłśļĪØ ļ╣äļĪØ IMUņÖĆņØś Ļ▓░ĒĢ®ņŚÉ ņØśĒĢśņŚ¼ ļ│┤ņÖäņØ┤ ņØ┤ļŻ©ņ¢┤ņ¦ĆĻĖ░ļŖö ĒĢśļéś ņĀĢĒÖĢļÅäĻ░Ć Ļ░ÉņåīĒĢ©ņØä ņĢī ņłś ņ׳ļŗż. ĒŖ╣Ē׳ GNSSņØś Ļ▓ĮņÜ░ ļÅģņĘ©ņ£©ņØ┤ ņØ╝ļ░śņĀüņ£╝ļĪ£ 20 Hz ņØ┤ĒĢśņØ┤ļ®░, ļö░ļØ╝ņä£ Ļ│ĀņŻ╝Ēīī ņ¦äļÅÖņØ╝ņłśļĪØ Ēżņ░®ļŖźļĀźņØ┤ ņāüļīĆņĀüņ£╝ļĪ£ ļ¢©ņ¢┤ņ¦äļŗżĻ│Ā ļ│╝ ņłś ņ׳ļŗż. ļ│Ė EXP-3ņŚÉņä£ļÅä 5 HzņØś ņ▓©ļæÉņŻ╝ĒīīņłśņØś ņŖżĒÄÖĒŖĖļ¤╝ņØĆ ņØ┤ņÖĆ Ļ░ÖņØĆ ļČĆņĀĢĒÖĢņä▒ņØ┤ ņØ╝ļČĆ ĒżĒĢ©ļÉśņ¢┤ ņ׳ņØä Ļ▓āņ£╝ļĪ£ ĒīÉļŗ©ļÉ£ļŗż.
5. PPP ņĖĪņ£äņØś ĒŖ╣ņä▒ Ļ▓ĆĒåĀ
ņāüĻĖ░ PPP Ļ▓░Ļ│╝ļź╝ ļ│┤ļ®┤ ĒāĆ Ļ▓░Ļ│╝ļōżĻ│╝ ļ╣äĻĄÉĒĢśņŚ¼ Ļ░Ćņ¦ä ņŗ£ĻĘĖļäÉņØś ņ¦ĢĒøäļź╝ ņל ļ│┤ņŚ¼ņŻ╝ņ¦Ć ļ¬╗ĒĢśļŖö Ļ▓āņ£╝ļĪ£ ļéśĒāĆļé¼ļŗż. ņäĀĒ¢ēņŚ░ĻĄ¼ (Choi et al., 2020)ņŚÉņä£ļÅä ņ£Āņé¼ĒĢ£ Ļ▓ĮĒ¢źņØ┤ ļéśĒāĆļé¼ļŹś Ļ▓āņ£╝ļĪ£ ļ│┤ņĢä ņĖĪņ£äņØś ļČĆņĀĢĒÖĢņä▒ņØĆ PPP ņĖĪņ£ä ļ│ĖņŚ░ņØś ĒŖ╣ņä▒ņŚÉ ĻĖ░ņØĖĒĢ£ Ļ▓āņ£╝ļĪ£ ĒīÉļŗ©ļÉ£ļŗż. PPP ļČäņäØņŚÉ ņé¼ņÜ®ļÉ£ CSRS-PPP ņä£ļ╣äņŖżļŖö 2020ļģä 10ņøö 20ņØ╝ļČĆļĪ£ PPP ļČäņäØ ņåīĒöäĒŖĖņø©ņ¢┤ (NRcan)ļź╝ version 2ņŚÉņä£ version 3ļĪ£ ņŚģĻĘĖļĀłņØ┤ļō£ĒĢśļ®┤ņä£ ļ░śņåĪĒīī (carrier wave) ļ¬©ĒśĖņĀĢņłś (ambiguity integer)ņØś ĒĢ┤ņāüļÅäļź╝ Ļ░ĢĒÖöĒĢśņśĆļŗż. Banville (2020)ņØĆ ļ│Ė ņŚģĻĘĖļĀłņØ┤ļō£ļÉ£ NRcanņØś ĒŖ╣ņä▒ņØä ļŗżņØīĻ│╝ Ļ░ÖņØ┤ ĻĖ░ņłĀĒĢśņśĆļŗż.
- RINEX ļ▓äņĀ╝ 3.0 ņØ┤ņāüņØä ņÜöĻĄ¼
- ļéĀņ×ÉĻ░Ć ļ░öļĆö ļĢī Ļ▓░Ļ│╝ņØś ņŚ░ņåŹņä▒ ĒÖĢļ│┤
- Cycle slipņŚÉ ļīĆĒĢ£ ļ│┤ļŗż ņŚģĻ▓®ĒĢ£ ĒīÉļ│ä : Ļ│╝Ļ▒░ņŚÉ ļ╣äĒĢśņŚ¼ cycle slipņØ┤ ļ¦ÄņØ┤ ņĀüļ░£
- Ēøäļ░®ĒĢäĒä░ņØś ņĀüņÜ®ņØä ĒåĄĒĢ£ ļ¬©ĒśĖņĀĢņłś ĒĢ┤ņāüļÅäņØś Ļ░£ņäĀ
- ņĄ£ņåī 5ļČä ņØ┤ņāüņØś ļŹ░ņØ┤Ēä░, 4Ļ░£ ņØ┤ņāüņØś ņ£äņä▒ ņłś ņÜöĻĄ¼
- Ļ│äņĖĪņŗ£Ļ░äņØ┤ ĻĖĖņłśļĪØ ļ¬©ĒśĖņĀĢņłśņØś ĒĢ┤ņāüļÅäĻ░Ć ņ”ØĻ░Ć
ļ│Ėļל PPP ņĖĪņ£äļŖö ņ▓£ņ▓┤ņØś ņ£äņä▒ļĀź (Ephemeris)ņØä ņé¼ņÜ®ĒĢśĻĖ░ ļĢīļ¼ĖņŚÉ ņןņŗ£Ļ░äņØś Ļ│äņĖĪņØä ņÜöĒĢ£ļŗż (Ozulu et al., 2018; Romero Andrade, et al., 2021; Erol et al., 2021). ĻĘĖļ¤¼ļéś ļ│Ė ņŚ░ĻĄ¼ņØś ņä▒ļŖźņŗ£ĒŚśņŚÉņä£ļŖö 5ļČä ņØ┤ļé┤ņØś ļŗ©ņŗ£Ļ░ä Ļ│äņĖĪņØä ņłśĒ¢ēĒĢśņśĆļŗż. Ļ│äņĖĪņŗ£Ļ░äņØś ņןļŗ©ņŚÉ ņØśĒĢ£ ĒÜ©Ļ│╝ļź╝ Ļ▓ĆĒåĀĒĢśĻĖ░ ņ£äĒĢśņŚ¼ ņČöĻ░ĆņĀüņØĖ ņŗżĒŚśņØä ņłśĒ¢ēĒĢśņśĆļŗż. ņŗżĒŚśņØĆ Ļ│äņĖĪļ¬©ļōłņØä Ļ░ĆļÅÖņŗ£Ēé© Ēøä ļīĆĻĖ░ ņŗ£Ļ░äņØä 10ļČä, 20ļČä, 30ļČä, 40ļČäņ£╝ļĪ£ ĒĢśĻ│Ā ĻĘĖ Ēøä ĻĄ¼ņĪ░ļ¼╝ Ļ░Ćņ¦ä ļ░Å ļŹ░ņØ┤Ēä░ ļÅģņĘ©ļź╝ ņ░®ņłśĒĢśļŖö ņŗØņ£╝ļĪ£ ņ¦äĒ¢ēĒĢśņśĆļŗż. Fig. 13ļŖö 4Ļ░£ņØś ļīĆĻĖ░ņŗ£Ļ░äņŚÉ ļīĆĒĢ£ CSRS-PPP ņä£ļ╣äņŖżņØś ņĖĪņ£äņŗ£ĻĘĖļäÉņØä ļ│┤ņŚ¼ņżĆļŗż. ņŗ£ĻĘĖļäÉļōżņØś ļüØ ļČĆĻĄ░ņŚÉņä£ ņĢĮĻ░äņØś Ļ░Ćņ¦äņŗ£ĻĘĖļäÉņØś ņ¦ĢĒøäļź╝ ļ│╝ ņłś ņ׳ņ£╝ļéś ļīĆĻĖ░ņŗ£Ļ░äņØ┤ ĻĖĖņ¢┤ņ¦Ćļ®┤ņä£ Ļ░Ćņ¦äņŗ£ĻĘĖļäÉņØ┤ ļ│┤ļŗż ļÜ£ļĀĘĒ׳ ļéśĒāĆļéśļŖö ĒśäņāüņØĆ ļ░£Ļ▓¼ļÉśņ¦Ć ņĢŖļŖöļŗż.
ņŚģĻĘĖļĀłņØ┤ļō£ļÉ£ CSRSņØś PPP ņä£ļ╣äņŖżļŖö ļ¬©ĒśĖņĀĢņłśņØś ĒĢ┤ņāüļÅäļź╝ ļåÆņØ┤ĻĖ░ ņ£äĒĢśņŚ¼ Ļ│╝Ļ▒░ļ│┤ļŗż ņŚäĻ▓®ĒĢ£ ļŹ░ņØ┤Ēä░ņØś ņ¦łĻ│╝ ņ¢æņØä ņÜöĻĄ¼ĒĢśĻ│Ā ņ׳ļŗż. ņØ┤ļĪ£ ņØĖĒĢśņŚ¼ ņĀĢņĀü ņĖĪņ£ä ļśÉļŖö ļÅÖņĀü ņĖĪņ£äļØ╝ļÅä ņÖäļ¦īĒĢśĻ▓ī ņøĆņ¦üņØ┤ļŖö ļ¼╝ņ▓┤ņØś ņ£äņ╣śļź╝ Ēżņ░®ĒĢśļŖö ņÜ®ļÅäļĪ£ņä£ļŖö ņĀĢĒÖĢļÅäĻ░Ć Ļ░£ņäĀļÉśņŚłņ£╝ļéś ĻĄ¼ņĪ░ļ¼╝ ņ¦äļÅÖļ│Ćņ£äņ▓śļ¤╝ ņ¦¦ņØĆ ņŗ£Ļ░äņŚÉ Ēü¼Ļ▓ī ņøĆņ¦üņØ┤ļŖö ļ¼╝ņ▓┤ ņÜ┤ļÅÖņØä Ēżņ░®ĒĢśļŖö ļŖźļĀźņØĆ ņśżĒ׳ļĀż Ļ░ÉņåīļÉśņŚłņØä Ļ░ĆļŖźņä▒ņØ┤ ņ׳ļŗż. Yigit (2016)ņØĆ ņ║öĒŗĖļ¤¼ļ▓ä ļ│┤ņØś ņ¦äļÅÖņŗżĒŚśņØä ņłśĒ¢ēĒĢśņśĆņ£╝ļ®░ PPP ļ¬©ļō£ņŚÉņä£ 1ņŗ£Ļ░äņØä ņŚ░ņåŹĻ┤ĆņĖĪĒĢśĻ│Ā ĻĘĖ Ļ▓░Ļ│╝ņŚÉņä£ ņłśĻ░£ņØś ņ×äņØś 1ļČä ļŹ░ņØ┤Ēä░ļź╝ ņČöņČ£ĒĢśņŚ¼ ņŗżĒŚśĻĄ¼ņĪ░ļ¼╝ņØś Ļ│Āņ£ĀņŻ╝Ēīīņłśļź╝ ļČäņäØĒĢ£ Ēøä ļ¬©ļōĀ 1ļČä ļŹ░ņØ┤Ēä░Ļ░Ć ļÅÖņØ╝ĒĢ£ Ļ│Āņ£ĀņŻ╝Ēīī ņłśļź╝ ņé░ņČ£ĒĢ©ņØä ļ│┤ņØĖ ļ░ö ņ׳ļŗż. PPP ļČäņäØņØĆ NRcanņØś version 2ļź╝ ņé¼ņÜ®ĒĢ£ ņĀÉ, ĻĘĖļ”¼Ļ│Ā ņĖĪņ¦ĆņÜ® (geodetic) GNSS ņłśņŗĀĻĖ░ļź╝ ņé¼ņÜ®ĒĢ£ ņĀÉņ£╝ļĪ£ ņØĖĒĢśņŚ¼ PPPĻ░Ć ņ¢┤ļŖÉ ņĀĢļÅä Ļ░Ćņ¦ä ņŗ£ĻĘĖļäÉņØä ņל Ēżņ░®ĒĢ£ Ļ▓āņ£╝ļĪ£ ļ│╝ ņłśļÅä ņ׳ļŗż. ņØ┤ņÖĆ Ļ░ÖņØ┤ PPP ņĖĪņ£äļź╝ ņØ┤ņÜ®ĒĢ£ ĻĄ¼ņĪ░ļ¼╝ņØś ļ│Ćņ£ä ņĖĪņĀĢņØś ņĀĢĒÖĢļÅäļŖö ņé¼ņÜ® GNSS ņłśņŗĀĻĖ░, Ļ│äņĖĪņŗ£Ļ░ä ĻĘĖļ”¼Ļ│Ā ļČäņäØ ņåīĒöäĒŖĖņø©ņ¢┤ņŚÉ ļö░ļØ╝ ļŗ¼ļØ╝ņ¦ĆļŖö Ļ▓āņ£╝ļĪ£ ļ│┤ņØ┤ļ®░, ļ│ĖĻ▓®ņĀüņØĖ ĻĄ¼ņĪ░ļ¼╝ Ļ▒┤ņĀĢņä▒ ĒÅēĻ░ĆņŚÉ ņé¼ņÜ®ļÉśĻĖ░ ņ£äĒĢ┤ņä£ļŖö ļ│┤ļŗż ņ▓┤Ļ│äņĀüņØĖ ņä▒ļŖźĒÅēĻ░Ćņŗ£ĒŚśņØ┤ ņłśĒ¢ēļÉśņ¢┤ņĢ╝ ĒĢĀ Ļ▓āņ£╝ļĪ£ ĒīÉļŗ©ļÉ£ļŗż. ĻĘĖļ”¼Ļ│Ā PPP ņĖĪņ£äņØś ņä▒ļŖźņØ┤ ņČ®ļČäĒ׳ ņ×ģņ”ØļÉśĻĖ░ ņĀäņŚÉļŖö ĒĢ┤ņ¢æĻĄ¼ņĪ░ļ¼╝ Ļ▒┤ņĀäņä▒ ļ¬©ļŗłĒä░ļ¦üņŚÉņä£ ņ×ĀņĀĢņĀüņ£╝ļĪ£ Single GNSS ņŗ£ĻĘĖļäÉņØä ļÅģņĘ©ĒĢśņŚ¼ ņŚ¼ĻĖ░ņŚÉ Ļ│ĀņŻ╝ĒīīĒåĄĻ│╝ĒĢäĒä░ņÖĆ ņä╝ņä£ņ£ĄĒĢ®ņØä ņĀüņÜ®ĒĢśļŖö Ļ▓āņØ┤ ĻČīņןļÉ£ļŗż.
6. Ļ▓░ļĪĀ ļ░Å ņĀ£ņĢł
ĻĄ¼ņĪ░ļ¼╝ Ļ▒┤ņĀĢņä▒ ļ¬©ļŗłĒä░ļ¦üņ▓┤Ļ│äļź╝ ĻĄ¼ņČĢĒĢśĻĖ░ ņ£äĒĢśņŚ¼ ĻĄ¼ņĪ░ļ¼╝ ļ│Ćņ£äļź╝ ņĖĪņĀĢĒĢśĻĖ░ ņ£äĒĢ£ ņä╝ņä£ņ£ĄĒĢ®ļ¬©ļōłņØś ĻĄŁņé░ĒÖöļź╝ ņ£äĒĢśņŚ¼ ņĀĆĻ░ĆĒśĢ GNSS ņä╝ņä£ņÖĆ IMU ņä╝ņä£ļź╝ ņĪ░ĒĢ®ĒĢśņśĆļŗż. ņé¼ņÜ®ļÉ£ GNSS ņłśņŗĀĻĖ░ (ZED-F9P)ļŖö ņŻ╝Ēīīņłś L1Ļ│╝ L2ļź╝ ņłśņÜ®ĒĢĀ ņłś ņ׳ņ£╝ļ®░ ļŗżņżæ ņ£äņä▒ (GPS, GLONASS, GALILEO, BAIDU ļō▒)ņØä Ēżņ░®ĒĢĀ ņłś ņ׳ļŗż. NMEA ņŗ£ĻĘĖļäÉņØä ļÅģņĘ©ĒĢśļ®░ IMUņÖĆ ļÅÖņŗ£ Ļ│äņĖĪņØä ņłśĒ¢ēĒĢśĻĖ░ ņ£äĒĢ£ ļ│äļÅäņØś ļÅģņĘ© ņåīĒöäĒŖĖņø©ņ¢┤ļź╝ ņ×æņä▒ĒĢśņśĆļŗż. PPP ņĖĪņ£äļź╝ ņ£äĒĢ£ ņøÉņŗ£ ļŹ░ņØ┤Ēä░ļŖö ņÖĖļČĆ ņåīĒöäĒŖĖņø©ņ¢┤ņØĖ RTKLIBļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ļÅģņĘ©ĒĢ£ Ēøä RINEX ĒīīņØ╝ļĪ£ ļ│ĆĒÖśĒĢ£ ļŗżņØī CSRS-PPP ņś©ļØ╝ņØĖ ņä£ļ╣äņŖżļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ Ēøäņ▓śļ”¼ĒĢśņśĆļŗż. ņØ┤ņÖĆ Ļ░ÖņØĆ ņØ╝ļĀ©ņØś ĒĢśļō£ņø©ņ¢┤ņÖĆ ņåīĒöäĒŖĖņø©ņ¢┤ņØś ņä▒ļŖźņØä ĒÅēĻ░ĆĒĢśĻĖ░ ņ£äĒĢśņŚ¼ ņ║öĒŗĖļĀłļ▓äņŗØ ļ¬©ĒśĢ ĻĄ¼ņĪ░ļ¼╝ņŚÉ ņØĖņ£äņĀü ņ¦äļÅÖņØä Ļ░ĆĒĢśĻ│Ā ņĖĪņ£äļ░®ļ▓Ģ (Single GNSS, VRS-RTK, PPP)ņØä ļŗ¼ļ”¼ĒĢśļ®░ ĻĄ¼ņĪ░ļ¼╝ ņ¦äļÅÖļ│Ćņ£äļź╝ Ļ│äņĖĪĒĢśņśĆļŗż. Ļ│äņĖĪ Ļ▓░Ļ│╝ļŖö Ļ│ĄĒåĄņĀüņ£╝ļĪ£ ņ░ĖĻ░ÆņØä ņĀ£Ļ│ĄĒĢśļŖö ļĀłņØ┤ņĀĖ ļ│Ćņ£äĻ│äņØś ņŗ£ĻĘĖļäÉĻ│╝ ļ╣äĻĄÉĒĢśņśĆļŗż. ņäĖļČĆ Ļ▓░ļĪĀņØĆ ļŗżņØīĻ│╝ Ļ░Öļŗż.
- GNSS ņŗ£ĻĘĖļäÉņŚÉņä£ ņŗ£ĻĘĖļäÉņØ┤ Ļ│ĀņĀĢļÉśņ¦Ć ņĢŖĻ│Ā ļ¢ĀļŗżļŗłļŖö ņØ╝ņóģņØś drift ĒśäņāüņØ┤ ļ░£ņāØĒĢśņśĆņ£╝ļéś Single GNSSņÖĆ VRS-RTKņØś Ļ▓ĮņÜ░ ņ░©ļŗ©ņŻ╝Ēīīņłś 1.0 Hzļź╝ Ļ░¢ļŖö Ļ│ĀņŻ╝Ēīī ĒåĄĻ│╝ĒĢäĒä░ņØś ņĀüņÜ®ņŚÉ ņØśĒĢśņŚ¼ ļĀłņØ┤ņĀĖ ļ│Ćņ£äĻ│äņØś ņŗ£ĻĘĖļäÉĻ│╝ ņ£Āņé¼ĒĢ£ ņŗ£ĻĘĖļäÉņØä ņ¢╗ņØä ņłś ņ׳ņŚłļŗż. ņŚ¼ĻĖ░ņŚÉ ņä╝ņä£ņ£ĄĒĢ®ņØä ņĀüņÜ®ĒĢ©ņ£╝ļĪ£ņŹ© ļŹöņÜ▒ Ē¢źņāüļÉ£ Ļ▓░Ļ│╝ļź╝ ņ¢╗ņØä ņłś ņ׳ņŚłļŗż. ņĢäņÜĖļ¤¼ ņä╝ņä£ņ£ĄĒĢ®ņØĆ ĻĄ¼ņĪ░ļ¼╝ņØś Ļ│Āņ£ĀņŻ╝Ēīīņłśļź╝ ņל ņ×¼ĒśäĒĢśļŖö Ļ▓āņ£╝ļĪ£ ļéśĒāĆļé¼ļŗż.
- VRS-RTKņŚÉ ņØśĒĢ£ ņä╝ņä£ņ£ĄĒĢ® Ļ▓░Ļ│╝Ļ░Ć ļĀłņØ┤ņĀĖ ļ│Ćņ£äĻ│äņØś Ļ│äņĖĪĻ▓░Ļ│╝ņŚÉ Ļ░Ćņן ĻĘ╝ņé¼ĒĢ£ Ļ▓āņ£╝ļĪ£ ļéśĒāĆļé¼ļŗż. ļö░ļØ╝ņä£, GNSS ņāüņŗ£ Ļ┤ĆņĖĪņåīļōżņØ┤ ņØĖĻĘ╝ņŚÉ ņ£äņ╣śĒĢśņŚ¼ GNSS ņłśņĀĢ RTCMņØä ņŗżņŗ£Ļ░ä ņĀäņåĪļ░øņØä ņłś ņ׳ļŖö ĒĢ┤ņĢłņäĀ ĻĘ╝ņ▓śņŚÉņä£ļŖö ļ│Ė VRS-RTK ņä╝ņä£ņ£ĄĒĢ®ņØä ĒåĄĒĢśņŚ¼ ĻĄ¼ņĪ░ļ¼╝ ļ│Ćņ£äļź╝ ņĀĢĒÖĢĒĢśĻ▓ī ņĖĪņĀĢĒĢĀ ņłś ņ׳ņØä Ļ▓āņ£╝ļĪ£ ĒīÉļŗ©ļÉ£ļŗż.
- ņĀĢļ░Ćļŗ©ļÅģņĖĪņ£ä (PPP)ļŖö ĒāĆ ņĖĪņ£äļ░®ļ▓ĢļōżĻ│╝ ļ╣äĻĄÉĒĢśņŚ¼ ĻĄ¼ņĪ░ļ¼╝ ļ│Ćņ£äņØś Ēżņ░®ļŖźļĀźņØ┤ Ļ░Ćņן ļ¢©ņ¢┤ņ¦ĆļŖö Ļ▓āņ£╝ļĪ£ ļéśĒāĆļé¼ļŗż. ņä╝ņä£ņ£ĄĒĢ®ņØś ņĀüņÜ®ņŚÉ ņØśĒĢśņŚ¼ ņ¢┤ļŖÉņĀĢļÅä Ļ░Ćņ¦ä ņŗ£ĻĘĖļäÉĻ│╝ ļŗ»ņØĆ ņŗ£ĻĘĖļäÉņØ┤ ņ¢╗ņ¢┤ņ¦ĆĻĖ┤ ĒĢśļéś ņĀĢĒÖĢļÅä ļ®┤ņŚÉņä£ ļŗżņåī ļ»ĖĒØĪĒĢśņśĆļŗż. ļ│Ė PPPņØś ņĀĢĒÖĢļÅäļŖö Ļ│äņĖĪņŗ£Ļ░ä, ņłśņŗĀĻĖ░ņØś ņóģļźś ĻĘĖļ”¼Ļ│Ā Ēøäņ▓śļ”¼ ļČäņäØ ņåīĒöäĒŖĖņø©ņ¢┤ņŚÉ ļŗ¼ļØ╝ņ¦ĆļŖö Ļ▓āņ£╝ļĪ£ ļ│┤ņØ┤ļ®░ ļ│┤ļŗż ņĀĢĒÖĢĒĢ£ ņä▒ļŖźĒīīņĢģ ļ░Å Ļ░£ņäĀņØä ņ£äĒĢ┤ņä£ļŖö ņØ┤ļōż ņÜöņåīļōżņØś ļ│ĆĒÖöļź╝ ĒåĄĒĢ£ ņ▓┤Ļ│äņĀüņØĖ ņä▒ļŖźņŗ£ĒŚśņØ┤ ĒĢäņÜöĒĢśļŗż. PPP Ļ│äņĖĪņØś ņĀĢĒÖĢļÅäĻ░Ć ņČ®ļČäĒ׳ ĒÖĢļ│┤ļÉĀ ļĢī Ļ╣īņ¦Ć ņ×ĀņĀĢņĀüņ£╝ļĪ£ Single GNSS ņä╝ņä£ņ£ĄĒĢ®ņØś ņé¼ņÜ®ņØ┤ ĻČīņןļÉ£ļŗż.






 PDF Links
PDF Links PubReader
PubReader ePub Link
ePub Link Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






